Before You Begin
Please note that the most up to date, PC Version of the VESC Tool is needed to complete this tutorial.
» Click here to download the Free Version «
There are a multitude of other pieces of software that should work, but due to the fact that they haven't been updated recently they are giving many FOCBOX users trouble.
So stay away from the following pieces of software:
FOCBOX UI
Enertion App
Android Version of VESC Tool
Unofficial Mac Version of VESC Tool
*INTERSTELLAR BASED INSTRUCTIONS*
Within this tutorial, we are going to be using the recommended numbers for our Interstellar Kits. If you are using different hardware than the Interstellar, you will need to use numbers relevant to your hardware. In this tutorial, we will point you in the right direction to find the values needed for your build.
Interstellar Quick Value Cheat Sheet
If you are familiar with the VESC Tool and don't need to follow the tutorial, here is all of the data we'll need to enter into the VESC Tool for the Interstellar Kit.
Battery Cells In Series: 10
Battery Capacity: 12ah
Motor Pulley: 15
Wheel Pulley: 38
Wheel Diameter: 97mm
Motor Current Max: Auto Filled After Motor Detection
Motor Current Max Brake: Auto Filled After Motor Detection
Battery Current Max: 30a
Battery Current Max Regen: -8a
Battery Voltage Cut-Off Start: 30.5v
Battery Voltage Cut-Off End: 28v
Max ERPM: 80,000
Max ERPM Reverse: -80,000
Use Smart Reverse: False
Throttle Expo: -20%
Throttle Expo Brake: -20%
Throttle Mode: Natural
Don't Feel Like Reading?
If you'd rather watch the video tutorial you can watch it here:
Plug Everything In
The first step is to plug all of your cables and connectors in.
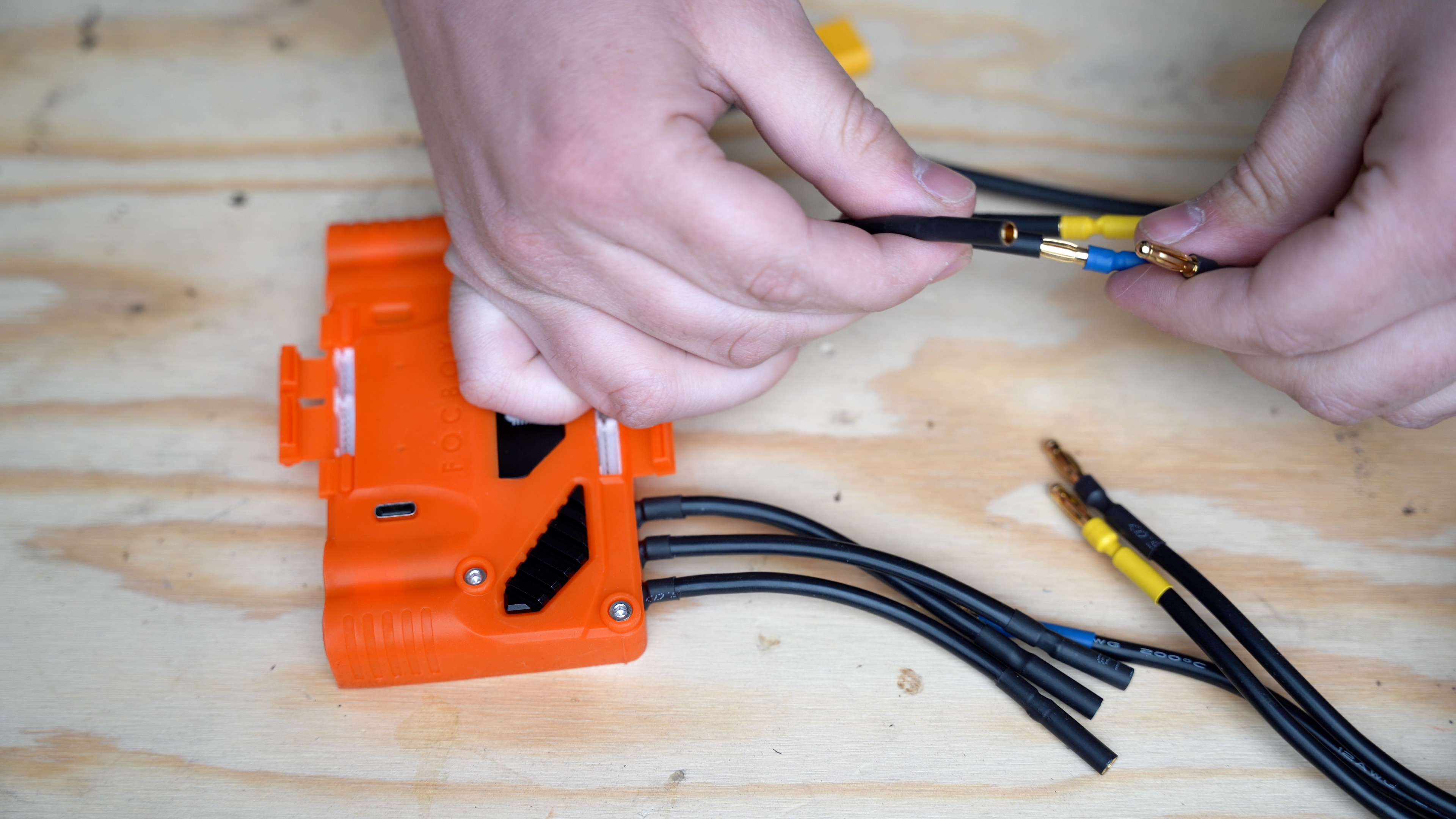
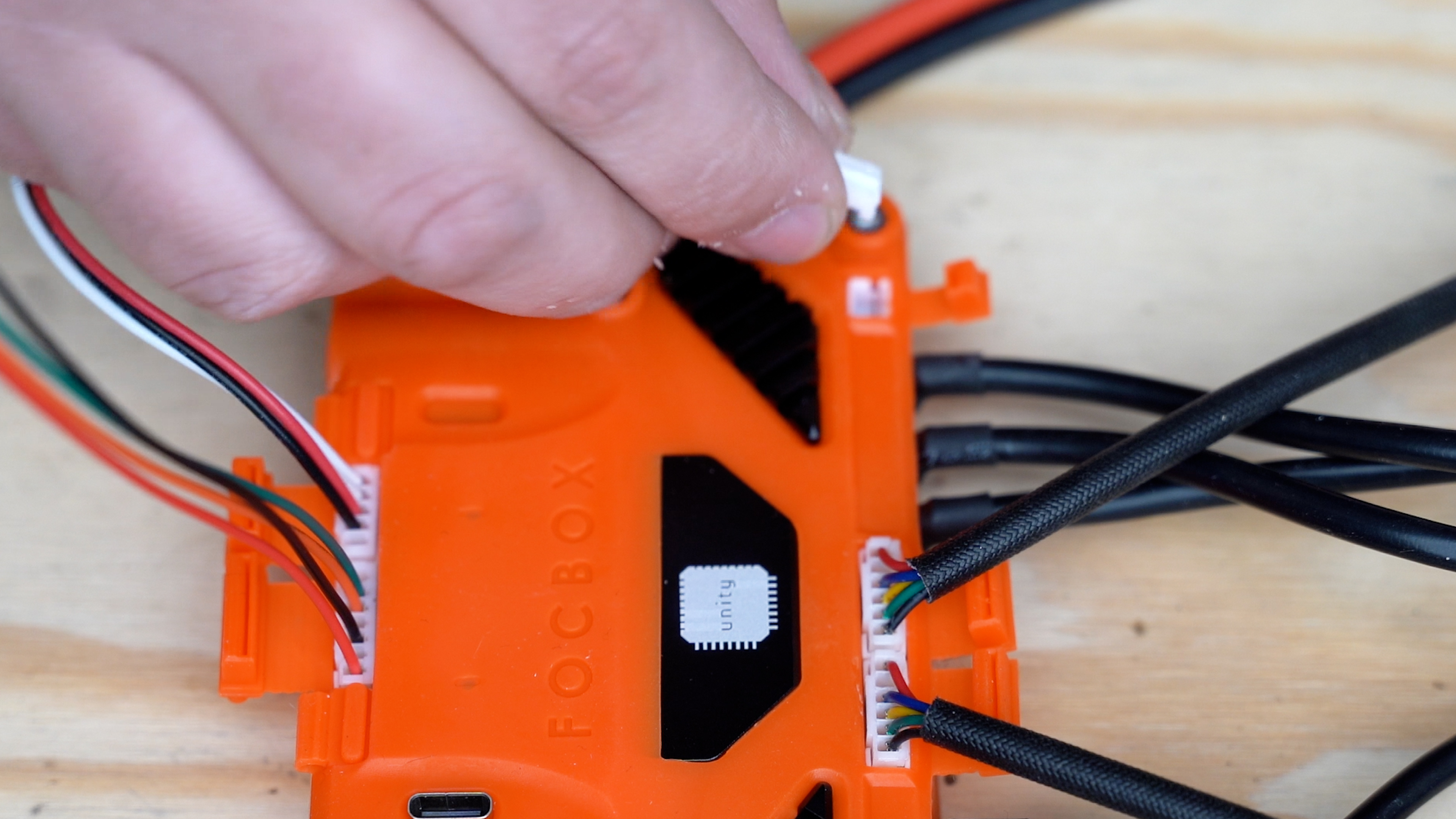
Plug in your 6 Phase wires.
Order doesn't matter. Just be sure that the 3 phase wires from each motor are all plugged in on the same side of the FOCBOX.
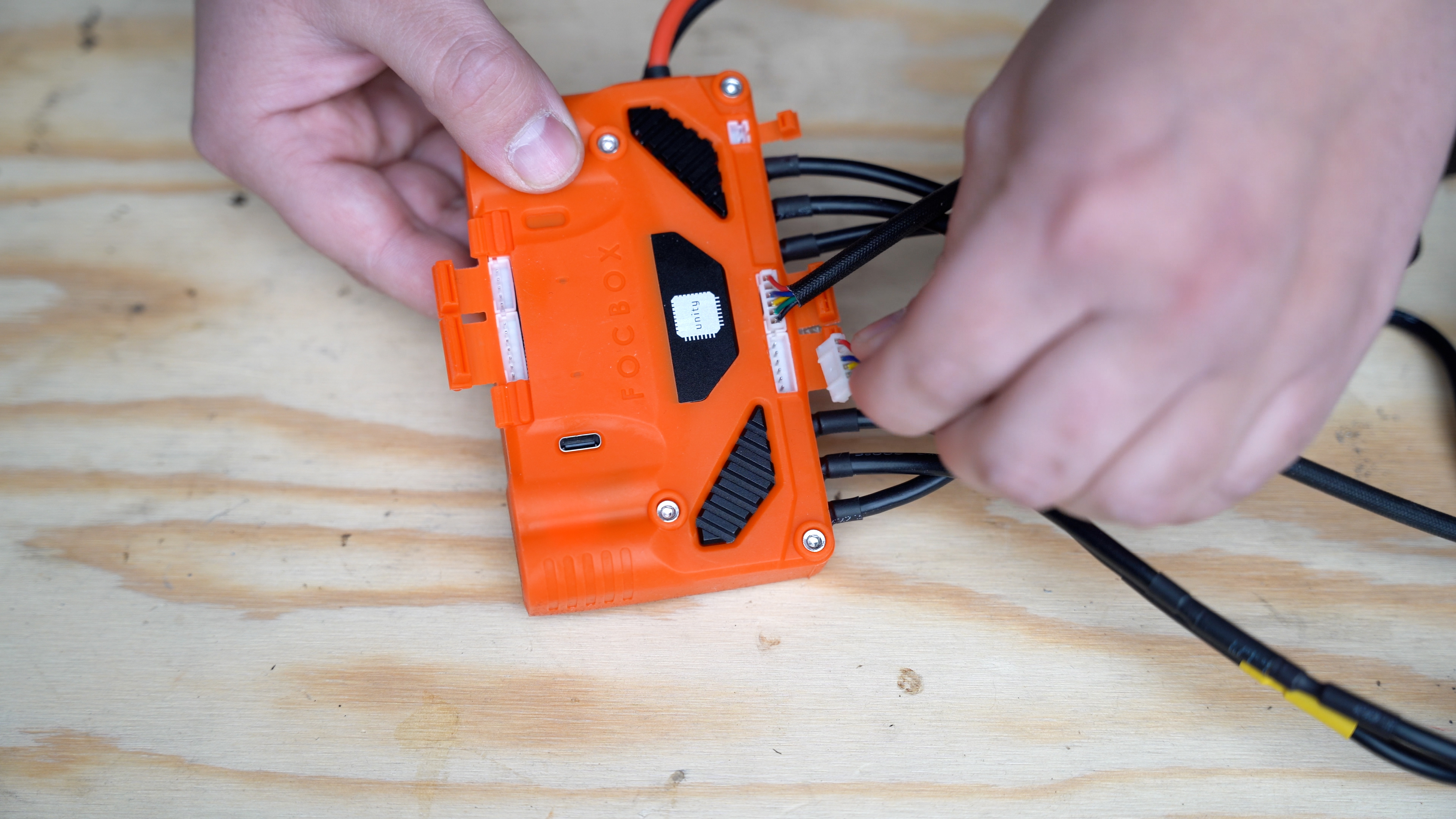
Plug your sensor wires in.
Be sure that each of your sensor wires are being plugged into the port that is on the same side as that motor's phase wires.
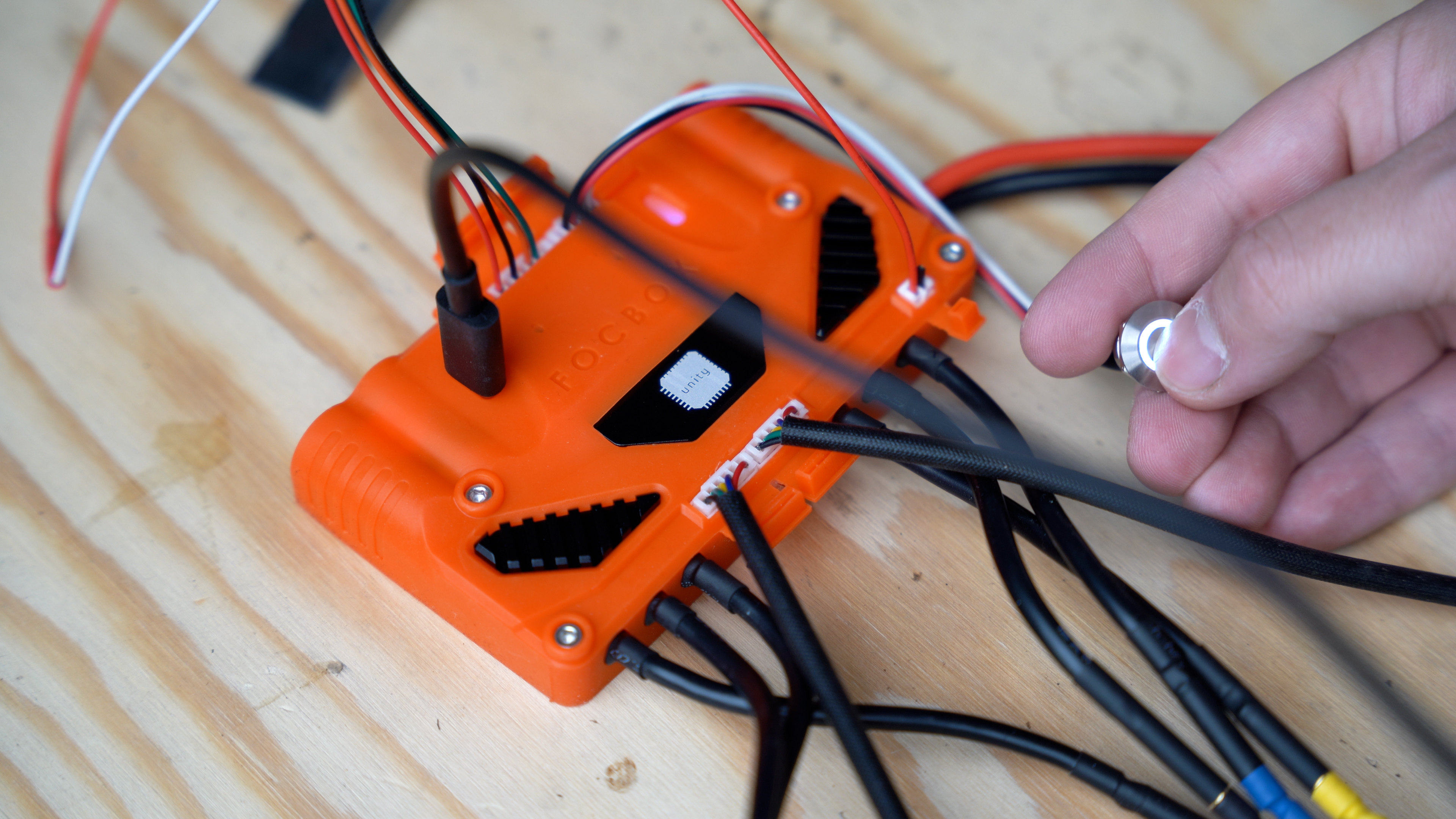
Plug in the power button.
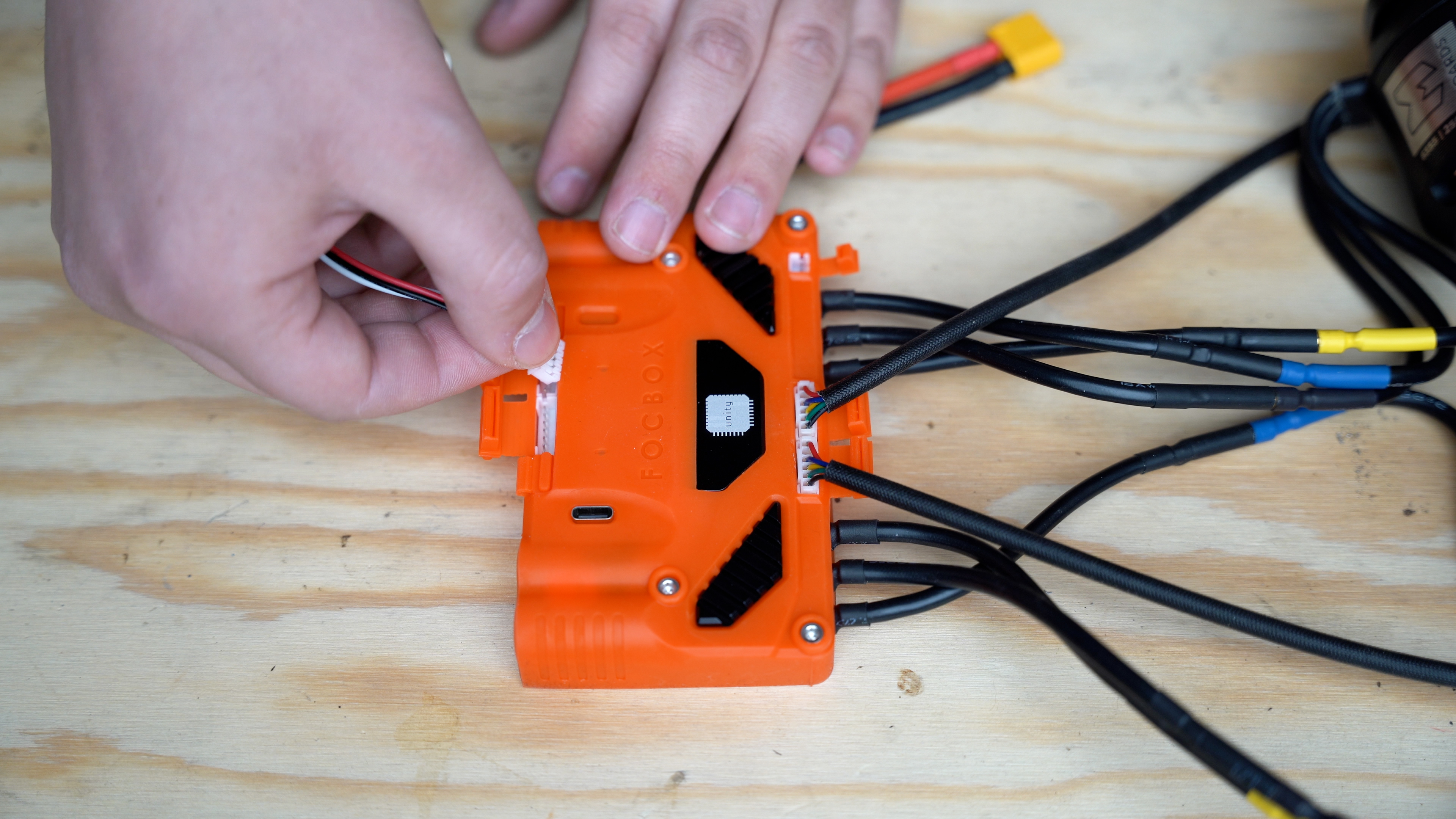
Plug in the remote's receiver.
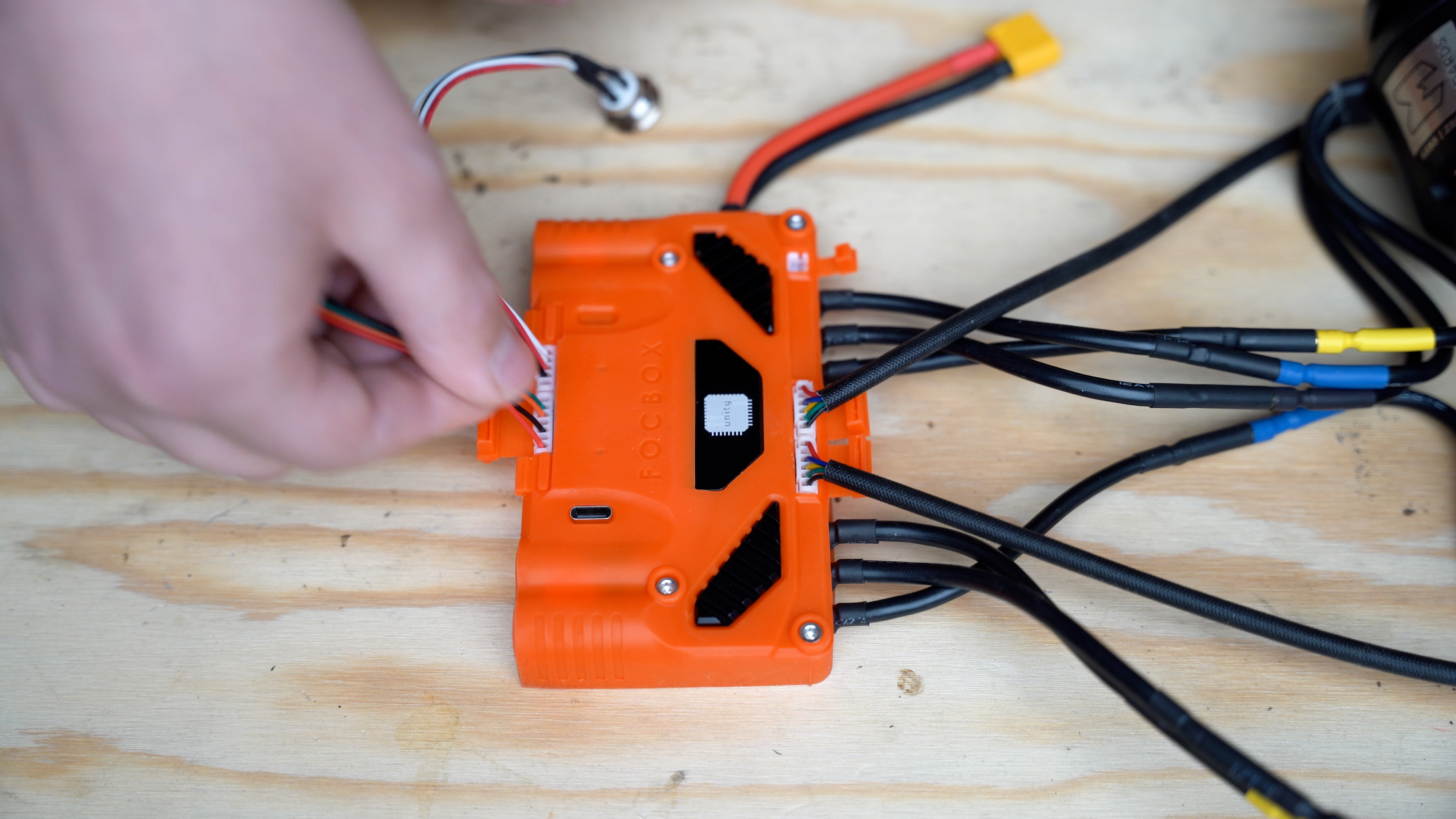
Plug in the 2 pin Voltage Monitor Cable.
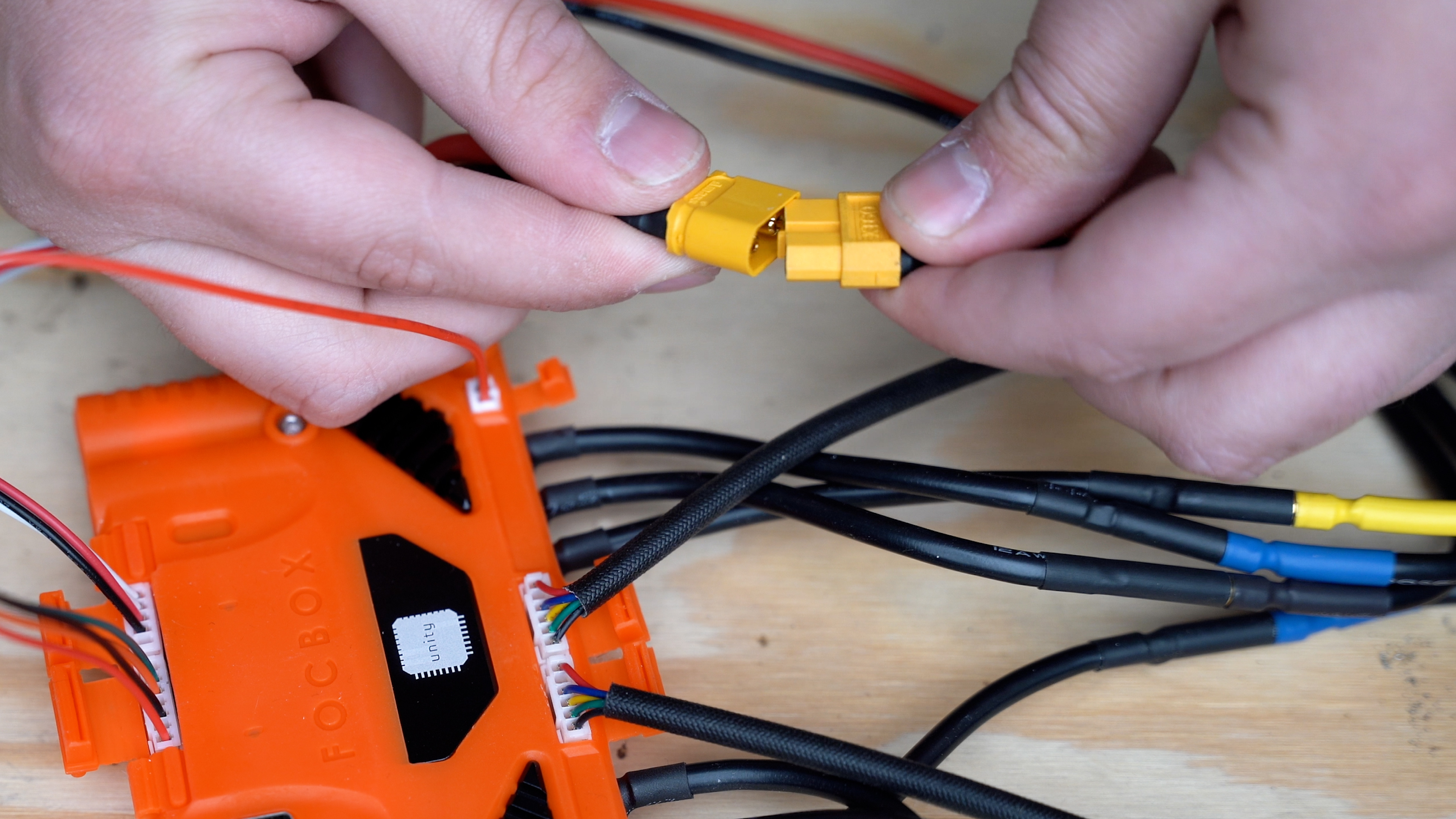
Supply power to the FOCBOX by connecting to the battery.
Connect the FOCBOX to your PC via the USB-C cable then power on the FOCBOX.
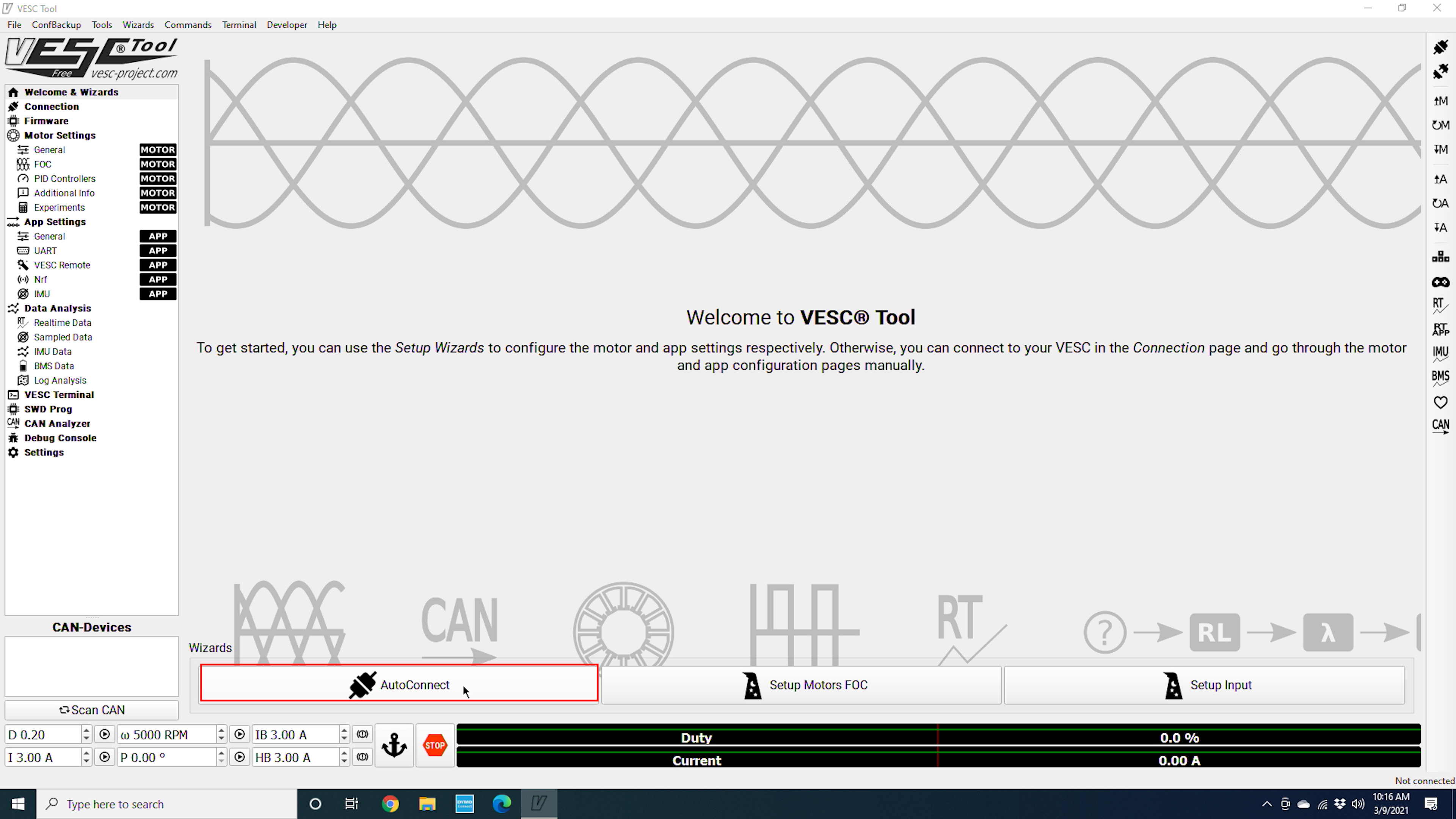
Open the VESC Tool software and click 'Auto Connect'
Once your FOCBOX has connected, you may get an alert letting you know that you need to update the firmware.
Click 'OK'.
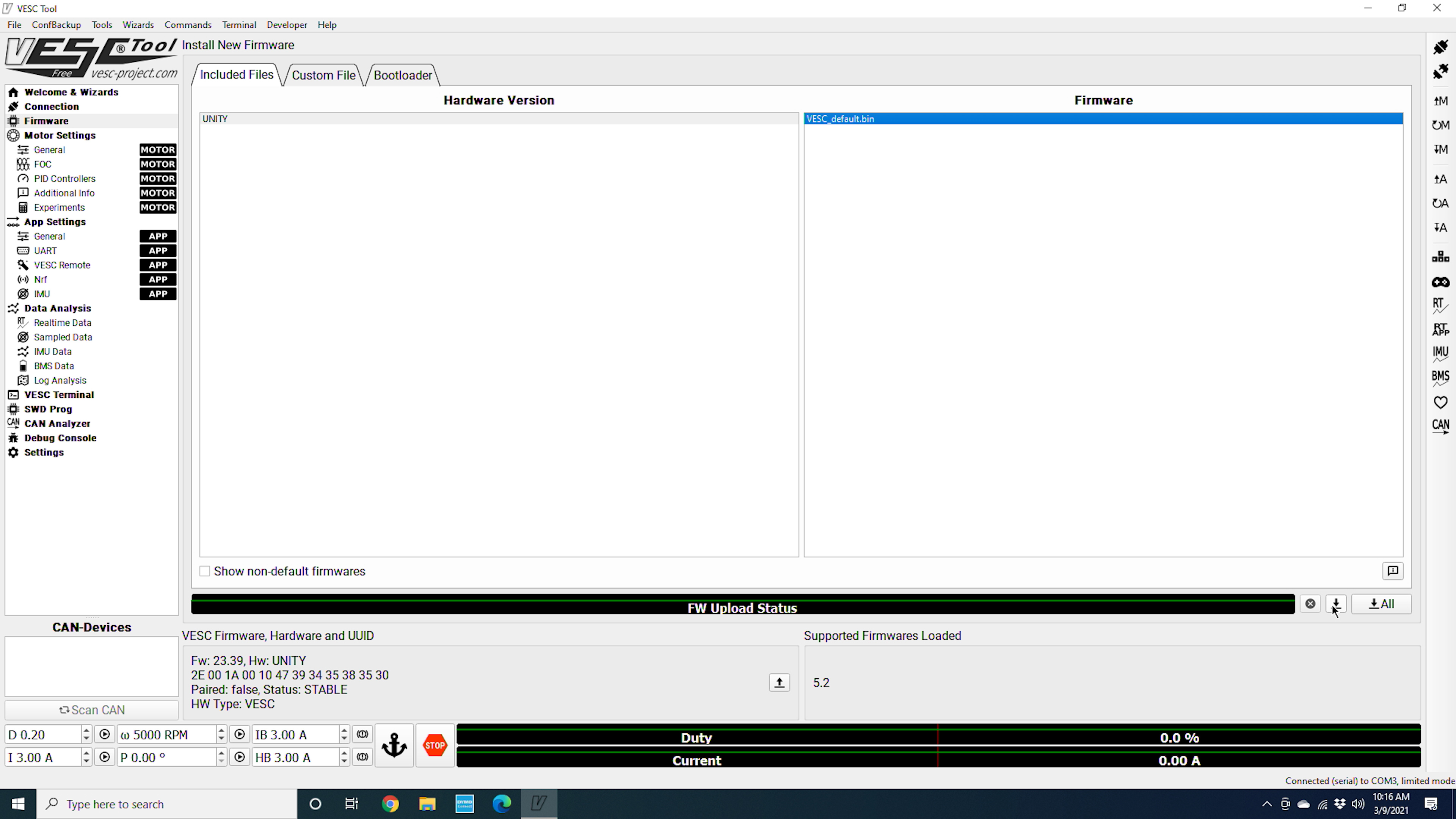
On the left hand side of the VESC Tool, click on the 'Firmware' section.
Click on 'UNITY'
Click on 'VESC_default.bin'
Then click the download button. (Button Underneath cursor).
Click 'YES'
The firmware update will take about a minute to complete.
During the Update AND 10 seconds after it's completed, DO NOT DO ANY OF THE FOLLOWING:
- Turn off the FOCBOX
- Turn off the PC
- Disconnect the battery
- Unplug the USB-C Cable
- Close the VESC Tool app
Once the update is done, click 'OK'.
Click 'AutoConnect' again to reconnect the FOCBOX.
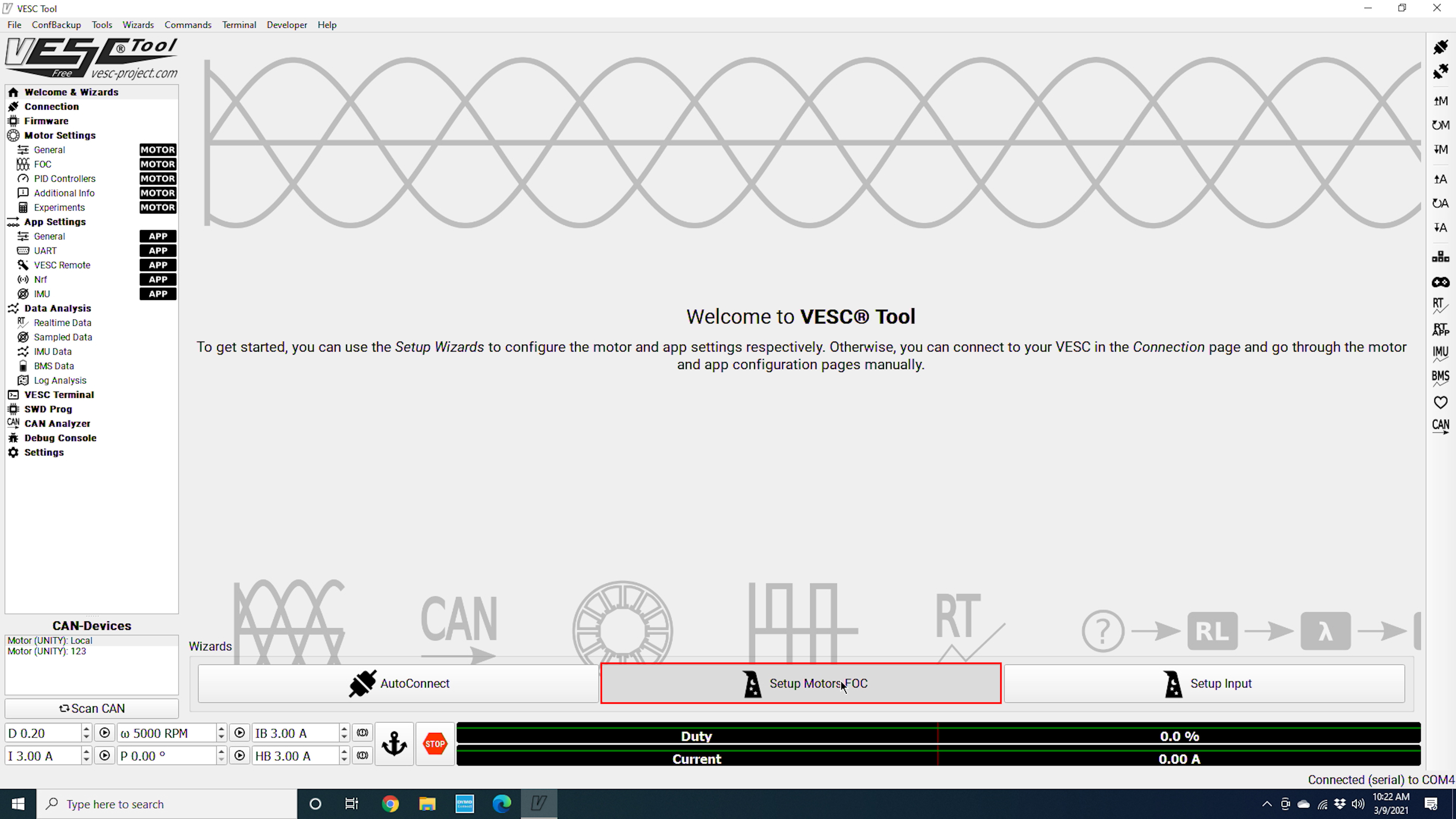
Once the FOCBOX has connected, click 'Setup Motors FOC'.
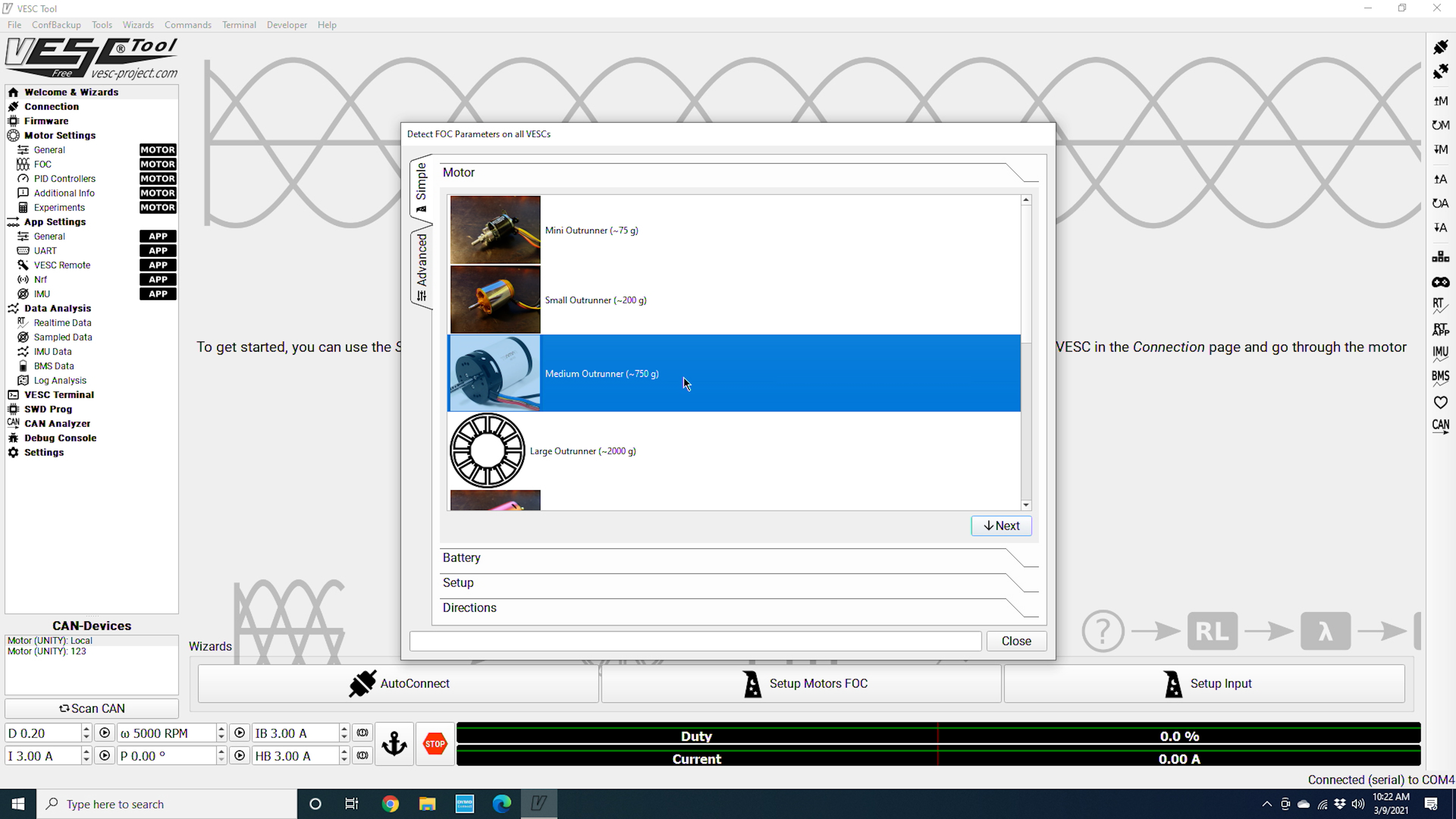
Select 'Medium Outrunner'
Click Next.
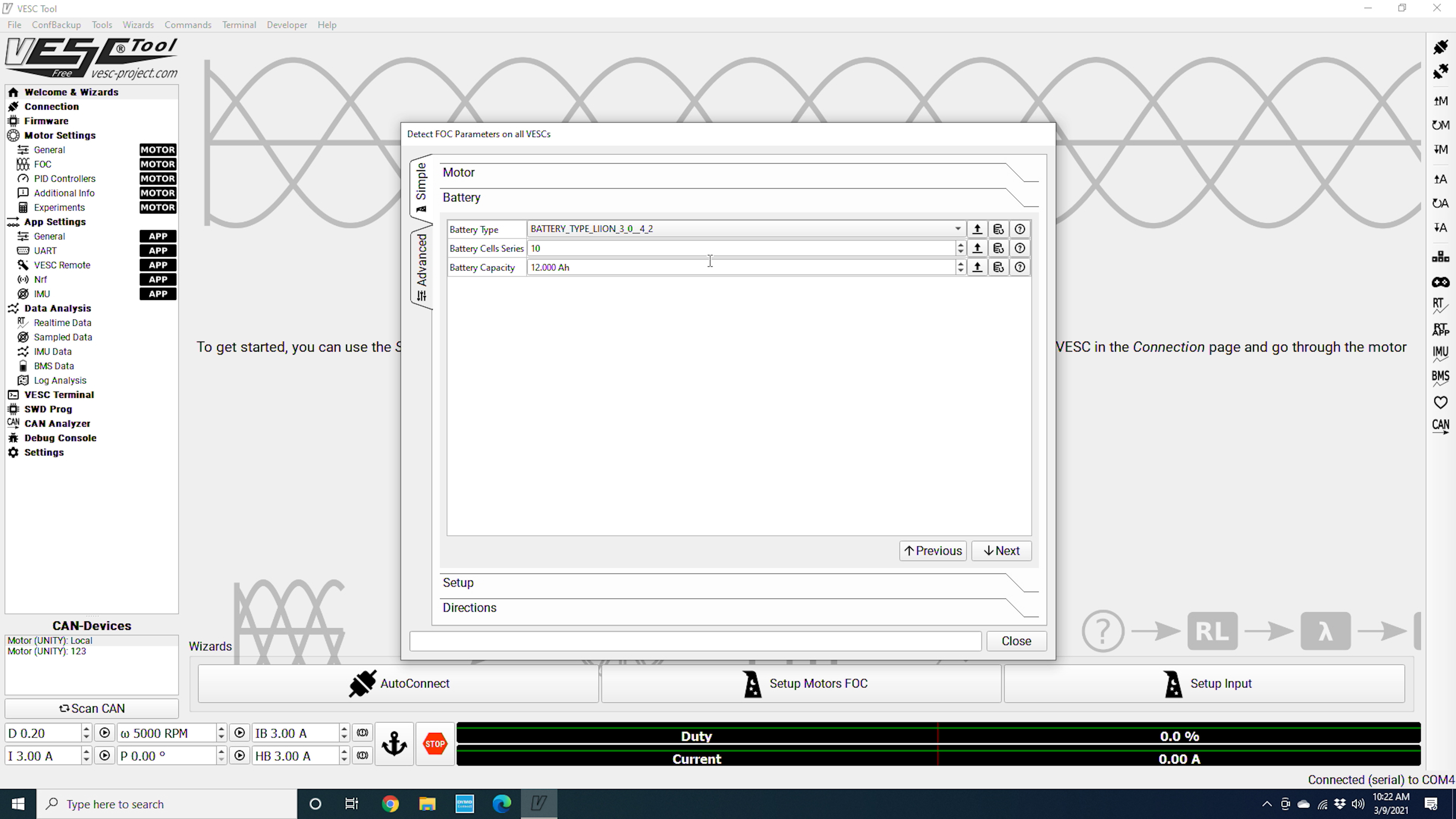
Enter the amount cells you are running in Series.
Interstellar Users: 10
Enter the total pack capacity in Ah.
Interstellar Users: 12
Click Next.
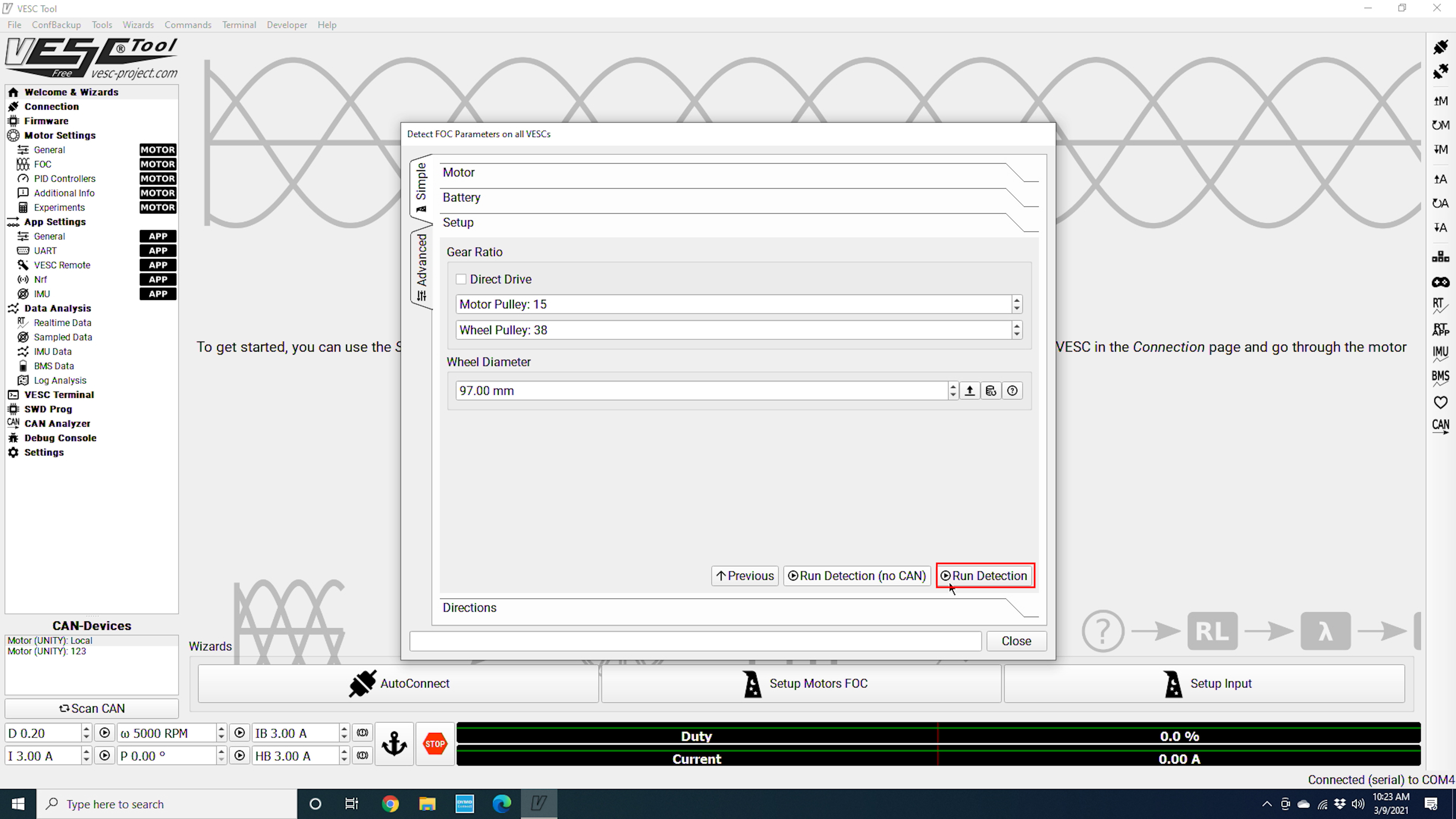
Count the amount of teeth you have on your motor pulley and enter the value.
Interstellar Users: 15
Count the amount of teeth you have on your wheel pulley and enter the value.
Interstellar Users: 38
Enter the diameter of your wheels in mm.
Interstellar Users: 97mm
Then Click 'Run Detection'.
At this point your motors will spin. So make sure you lift them off of the table or position them in a way that allows them to spin freely.
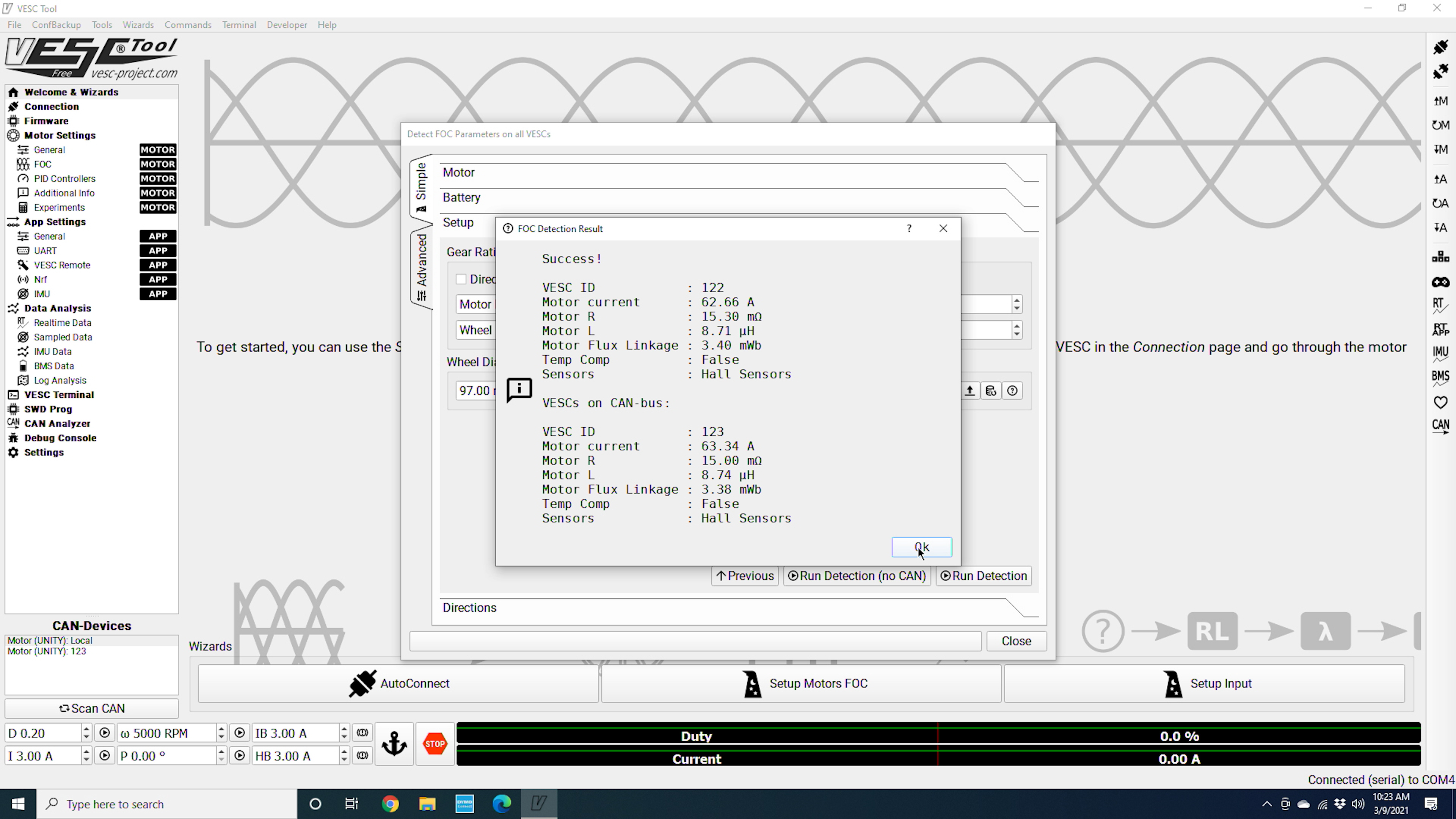
Your motors will spin and make some sounds, once detection is done, the data the VESC Tool collected will appear on the screen.
Click 'OK'.
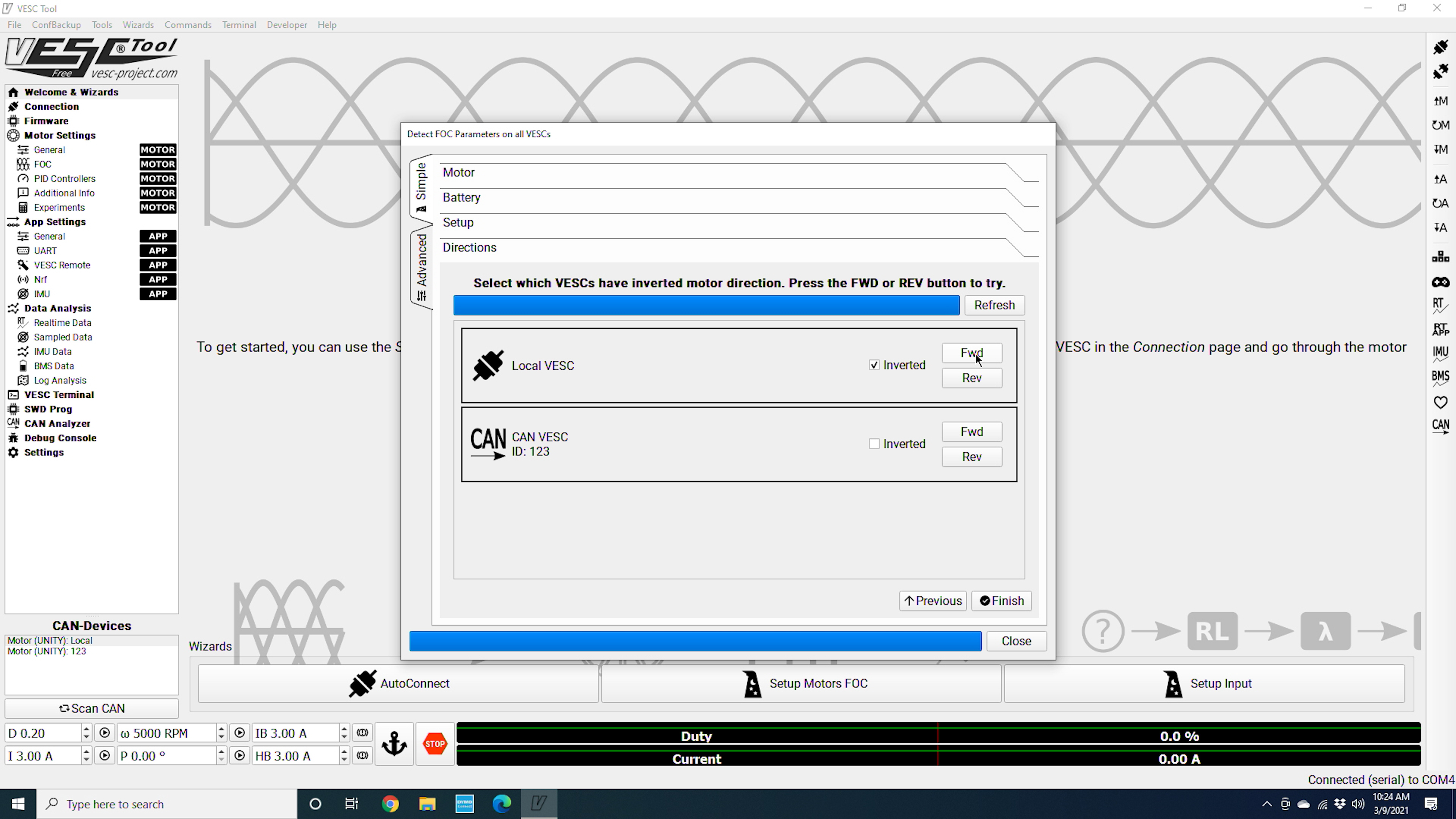
Now we need to set our motor direction. Click on the "Forward" button. This will spin one of your motors. If the motor spins in the correct direction, move on to the next motor. If it spins in the wrong direction, check the 'Inverted' box to change the direction.
Once you have verified that both motors are spinning the correct direction, click 'Finish'.
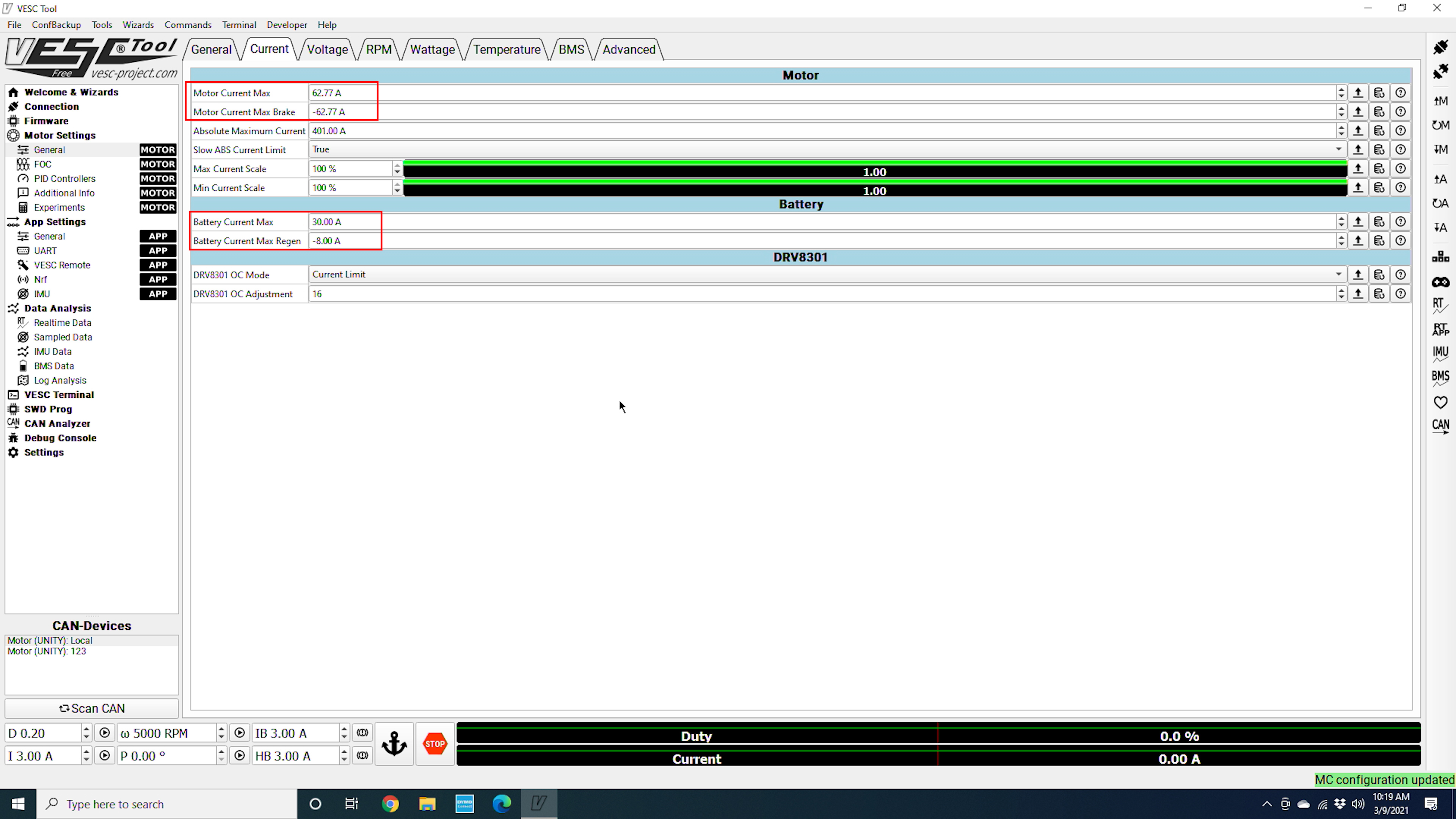
Now navigate to the 'General' section listed under 'Motor Settings'.
Tab over to the 'Current' settings.
Here we'll focus on 4 values.
'Motor Current Max' and 'Motor Current Max Brake' will be autofilled during Motor Detection.
We'll need to set the Battery values manually.
Battery Current Max
Battery Current Max references the maximum amount of current that we are going to allow each motor to pull from the battery. The Interstellar's battery can handle a current of 60a. Since we are using 2 motors, we need to divide our pack's max current by 2. So we will enter 30a.
If you are using a different battery than the MBoards 10s4p, you'll need to base your values off of your pack's max draw.
Battery Current Max = (Total Pack Max Discharge Rate) / 2
Interstellar Users: 30a
Battery Current Max Regen
Regen refers to the amount of amps we can push back into the battery to charge as we hit our brakes. The way we come up with this number is with this formula:
Regen = [(Charge Rate Per Cell) x (Cells in Parallel)] / 2 Motors
In this case, the Samsung 30q cells can charge safely at a rate of 4a per cell.
4a x 4 Parallel Groups = 16a
16a / 2 motors = 8a
We'll enter in 8a as a negative number.
Remember you'll want to figure out what the acceptable charge rate is for your particular cells.
Interstellar Users: -8a
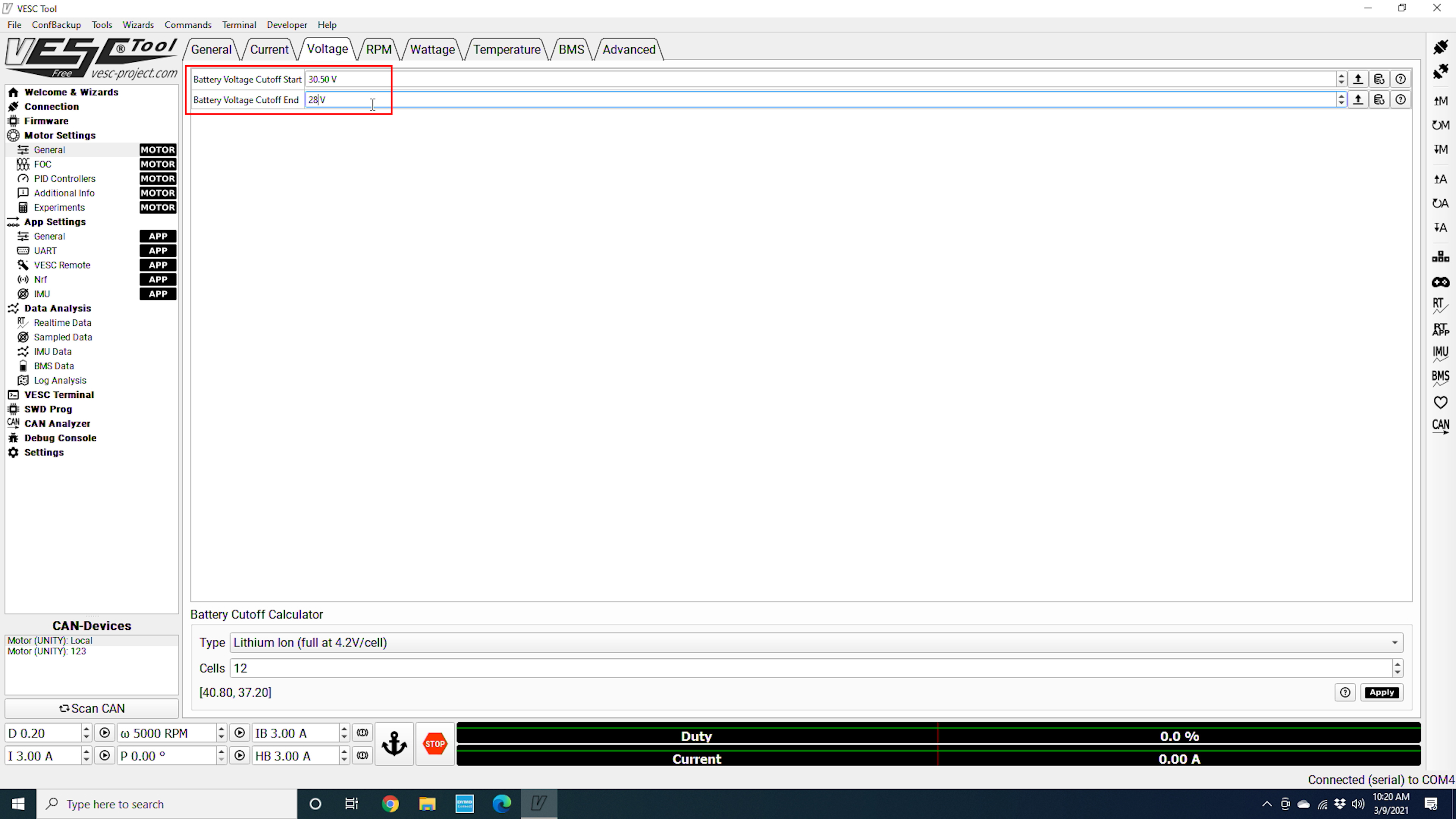
Next we'll configure our Voltage Cutoff values. These values dictate when the FOCBOX will cut the battery off from supplying power protecting the battery from being over discharged.
'Battery Cutoff Start' will begin to slow the board down to conserve energy.
'Battery Cutoff End' is when the board will stop operating.
We usually use this formula to get our values:
Cutoff Start = (Number of cells in series) x 3.05
Cutoff End = (Number of cells in series) x 2.8
Interstellar Users: 30.5v & 28v
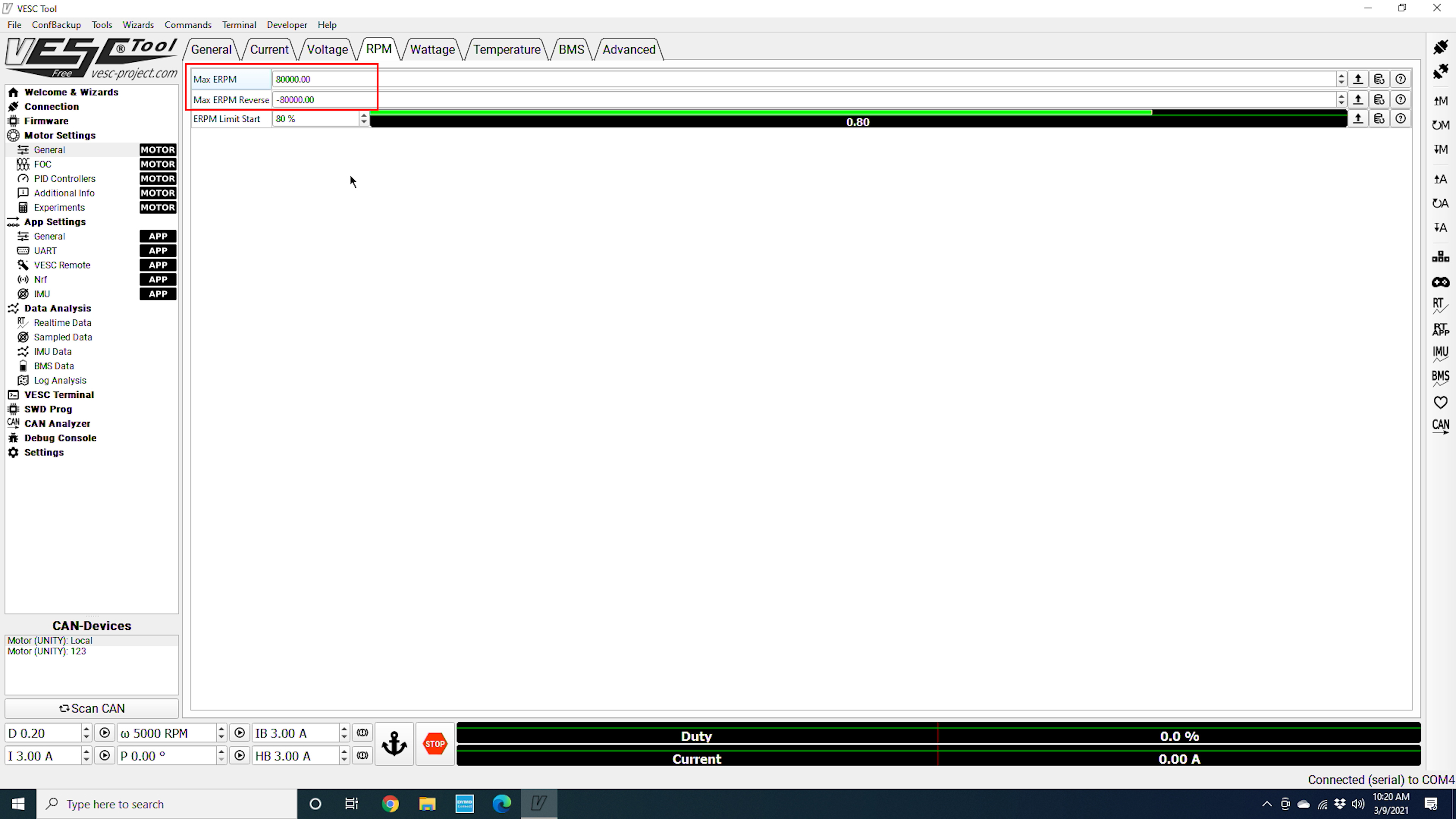
Next we need to set the ERPM limits to prevent the FOCBOX from being over loaded.
All Builds:
Max ERPM: 80,000
Max ERPM Reverse: -80,000
Before moving on to the next step, save your work by clicking this button:
At this point we've successfully configured the 1st half of the FOCBOX.
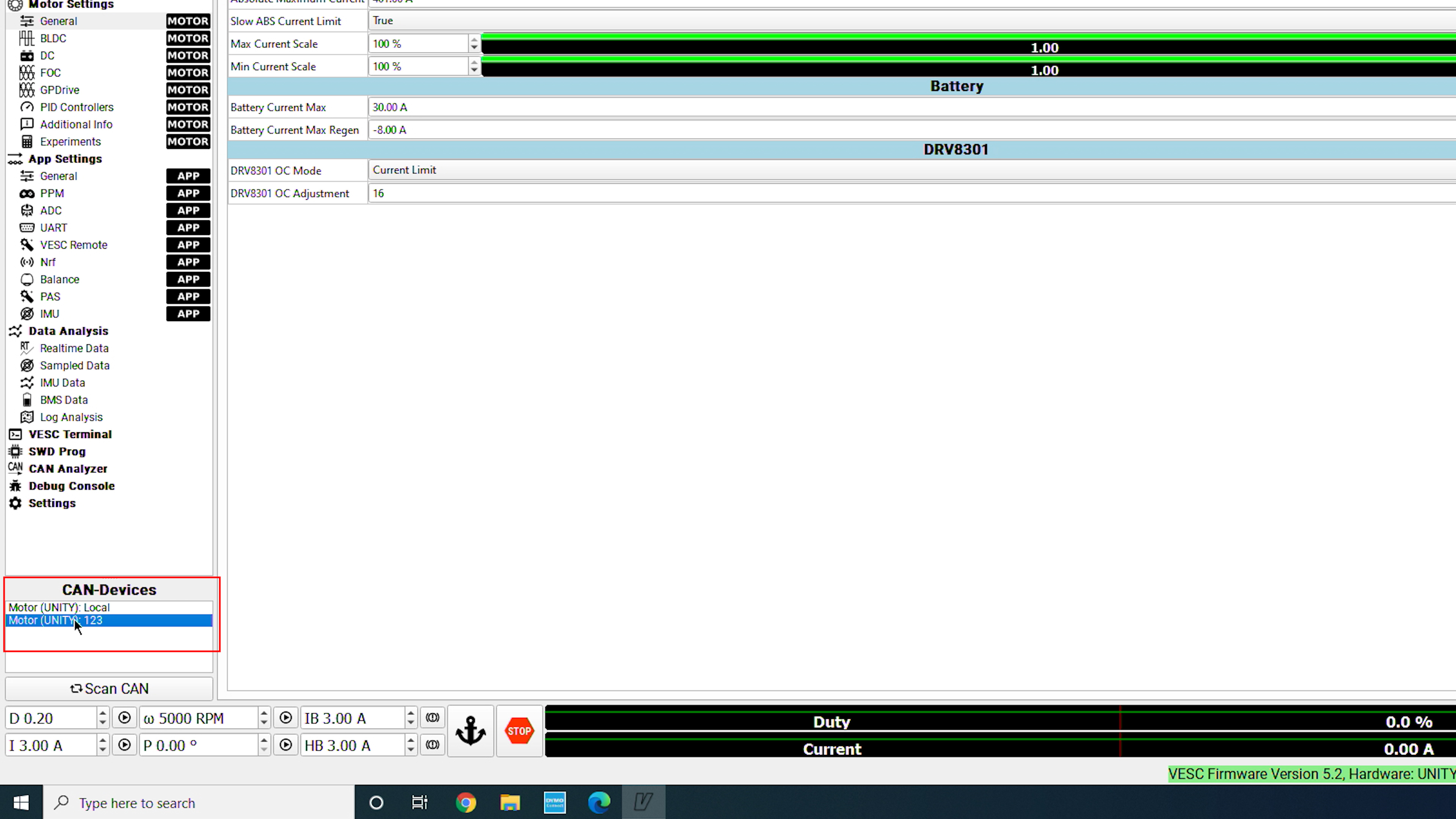
To begin programming the 2nd half, click the second item in this list.
Now enter the same data we just entered for the 'Current', 'Voltage', and 'RPM' tabs.
Then remember to save your work again.
And finally we'll need to setup a few remote preferences.
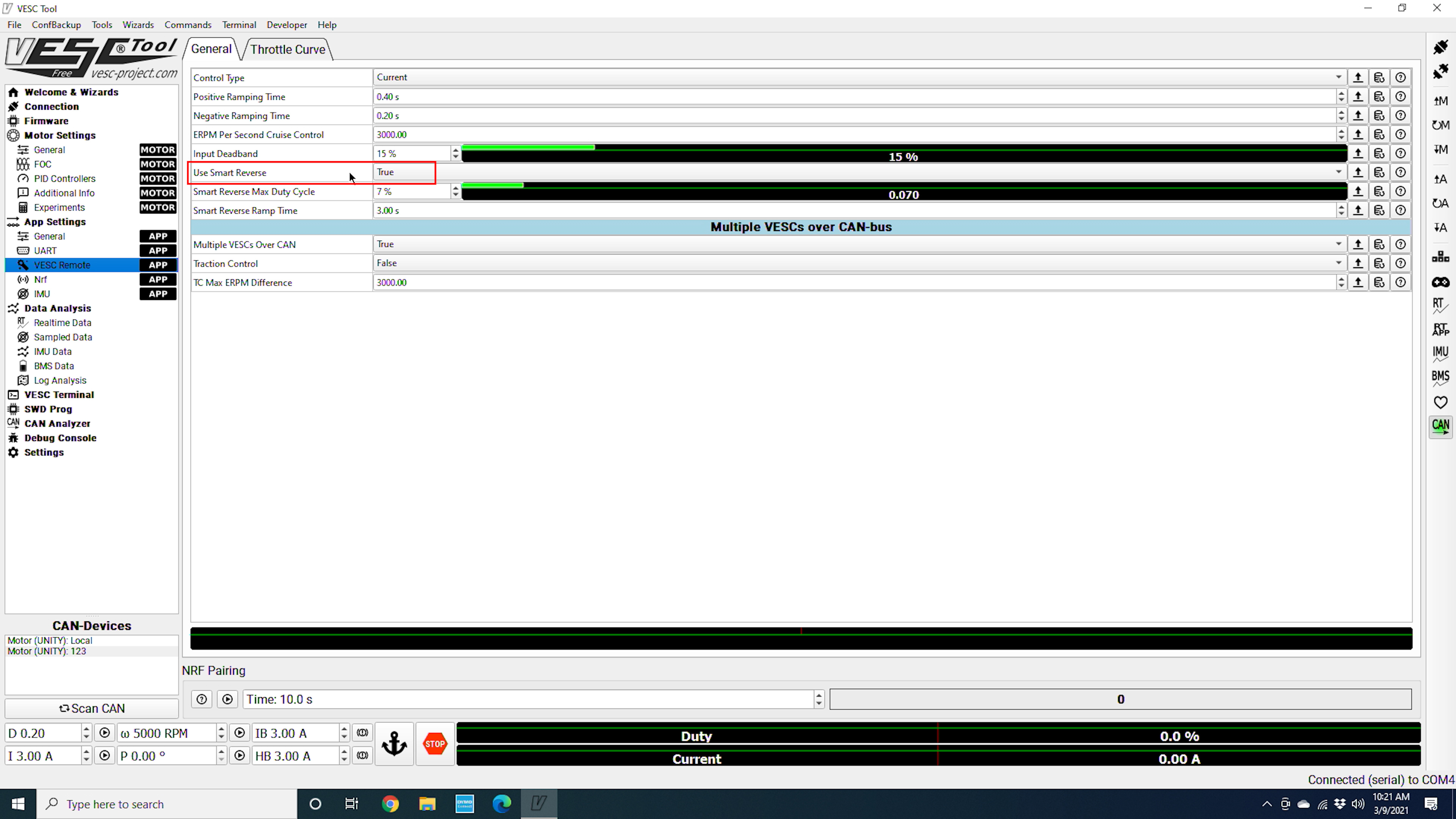
We usually turn 'Smart Reverse' off.
Leaving this function on will begin slowly reversing the board when the brakes are applied. We typically like our brakes to hold their position when being applied and don't really use a reverse function which is why we set this value to 'False'.
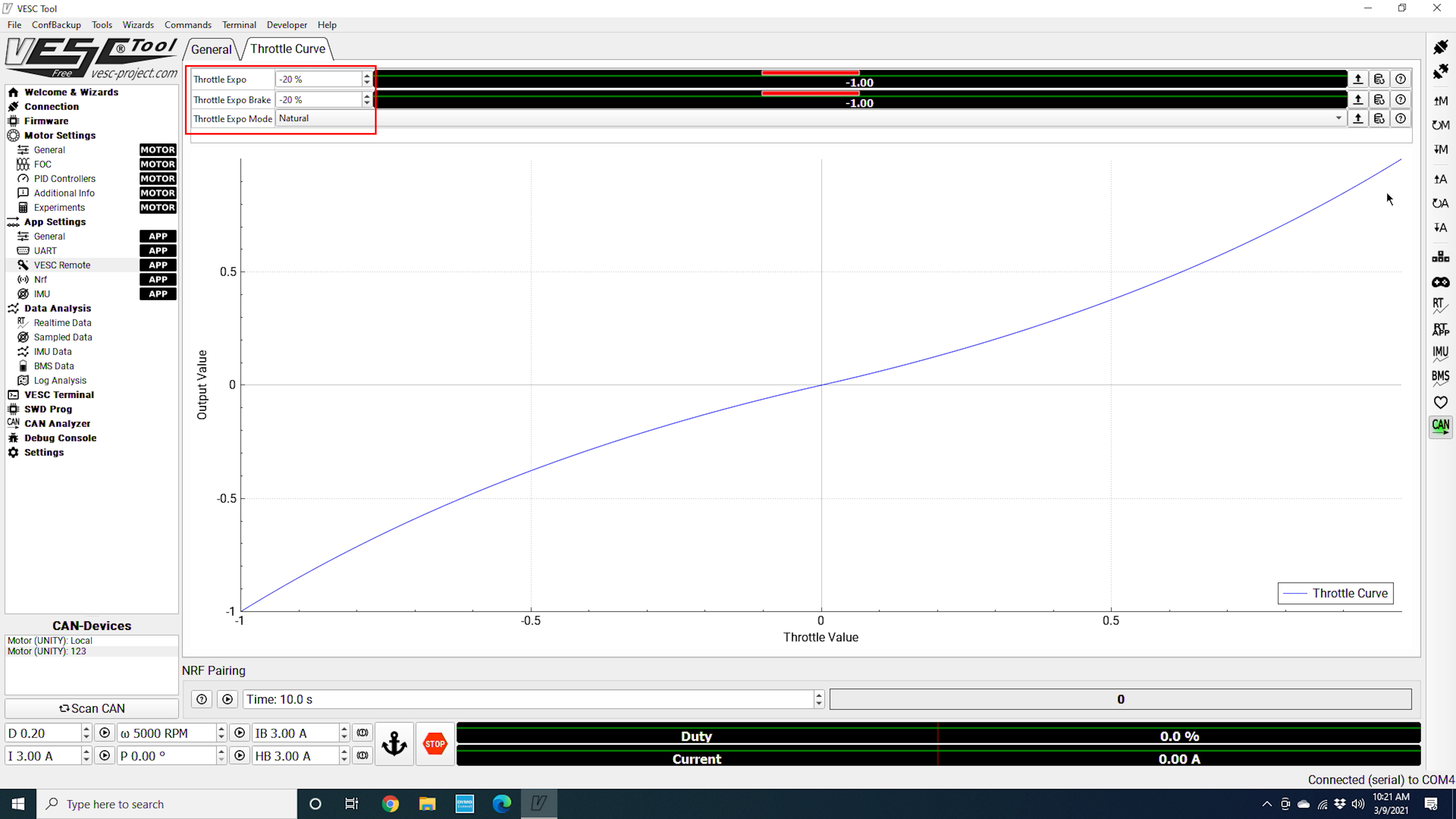
Next, tab over to the 'Throttle Curve' tab.
Here is where we will feather out our brakes and acceleration so they aren't too aggressive.
A negative number is smoother, a positive number is more aggressive.
You can play with these numbers until you find a ride that you like.
We'd recommend: -20%, -20%, Natural
Interstellar Users: -20%, -20%, Natural
Now, click this button to save the remote preferences:
And click this button to disconnect your FOCBOX from the PC.
And that't it! You are all set! You are okay to disconnect the FOCBOX from your PC and to power off the FOCBOX.
Need extra help?
Send our support team an email here: support@mboards.co
Comments
0 comments
Please sign in to leave a comment.